Navigating the World with Occupancy Grid Maps: A Comprehensive Guide
Related Articles: Navigating the World with Occupancy Grid Maps: A Comprehensive Guide
Introduction
With great pleasure, we will explore the intriguing topic related to Navigating the World with Occupancy Grid Maps: A Comprehensive Guide. Let’s weave interesting information and offer fresh perspectives to the readers.
Table of Content
- 1 Related Articles: Navigating the World with Occupancy Grid Maps: A Comprehensive Guide
- 2 Introduction
- 3 Navigating the World with Occupancy Grid Maps: A Comprehensive Guide
- 3.1 Understanding the Concept: A Grid-Based Representation of Space
- 3.2 Construction and Updating: Building the Map
- 3.3 Applications: From Robots to Autonomous Vehicles
- 3.4 Advantages: Benefits of Occupancy Grid Maps
- 3.5 Limitations: Considerations for Occupancy Grid Maps
- 3.6 FAQs: Addressing Common Queries
- 3.7 Tips for Effective Occupancy Grid Map Usage
- 3.8 Conclusion: A Powerful Tool for Spatial Reasoning
- 4 Closure
Navigating the World with Occupancy Grid Maps: A Comprehensive Guide
Occupancy grid maps are a fundamental tool in robotics, autonomous navigation, and spatial reasoning. They provide a structured representation of the environment, allowing robots and other intelligent systems to understand their surroundings and plan efficient paths. This comprehensive guide will delve into the intricacies of occupancy grid maps, exploring their construction, applications, advantages, and limitations.
Understanding the Concept: A Grid-Based Representation of Space
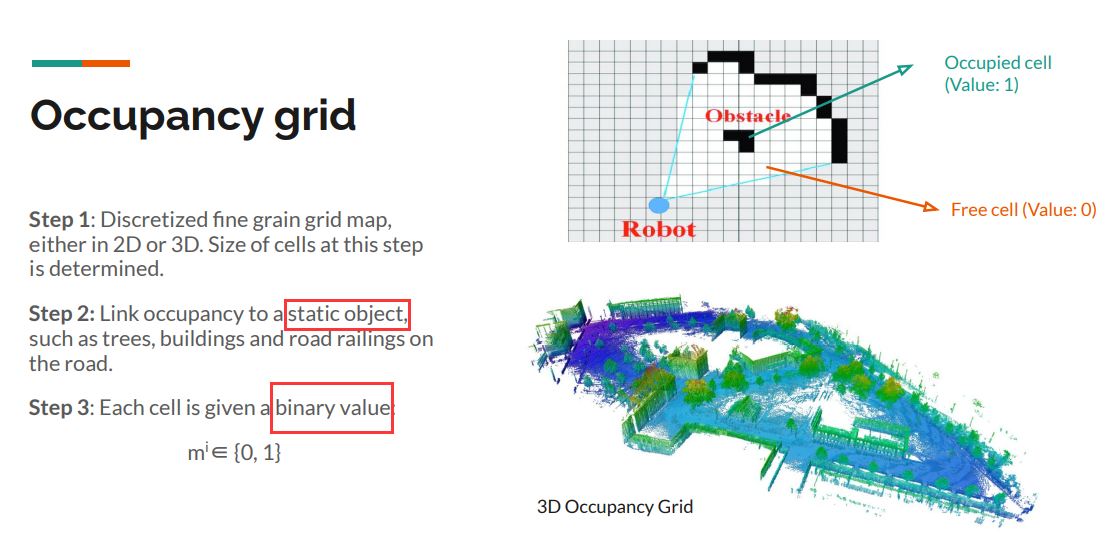
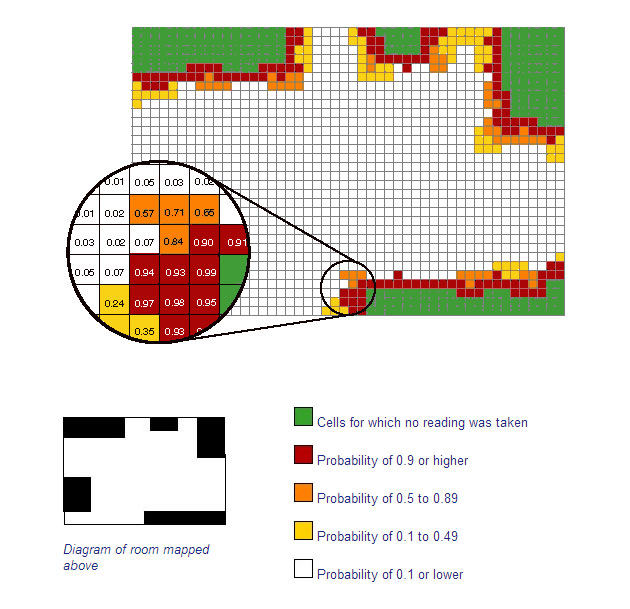
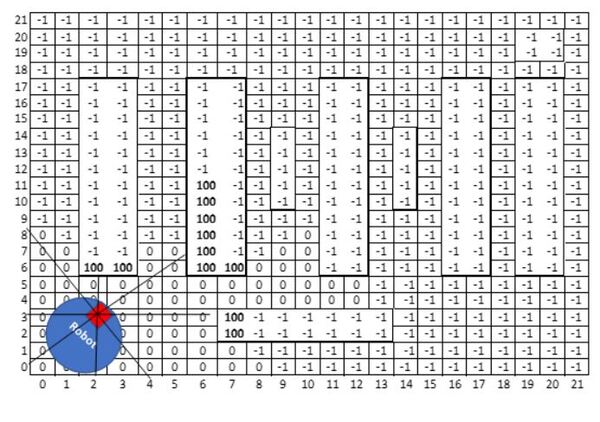
An occupancy grid map is a discrete representation of space, dividing the environment into a grid of cells. Each cell in the grid is assigned a probability value, indicating the likelihood of that cell being occupied by an obstacle. This probability is typically represented as a value between 0 and 1, with 0 representing an empty cell and 1 representing a fully occupied cell.
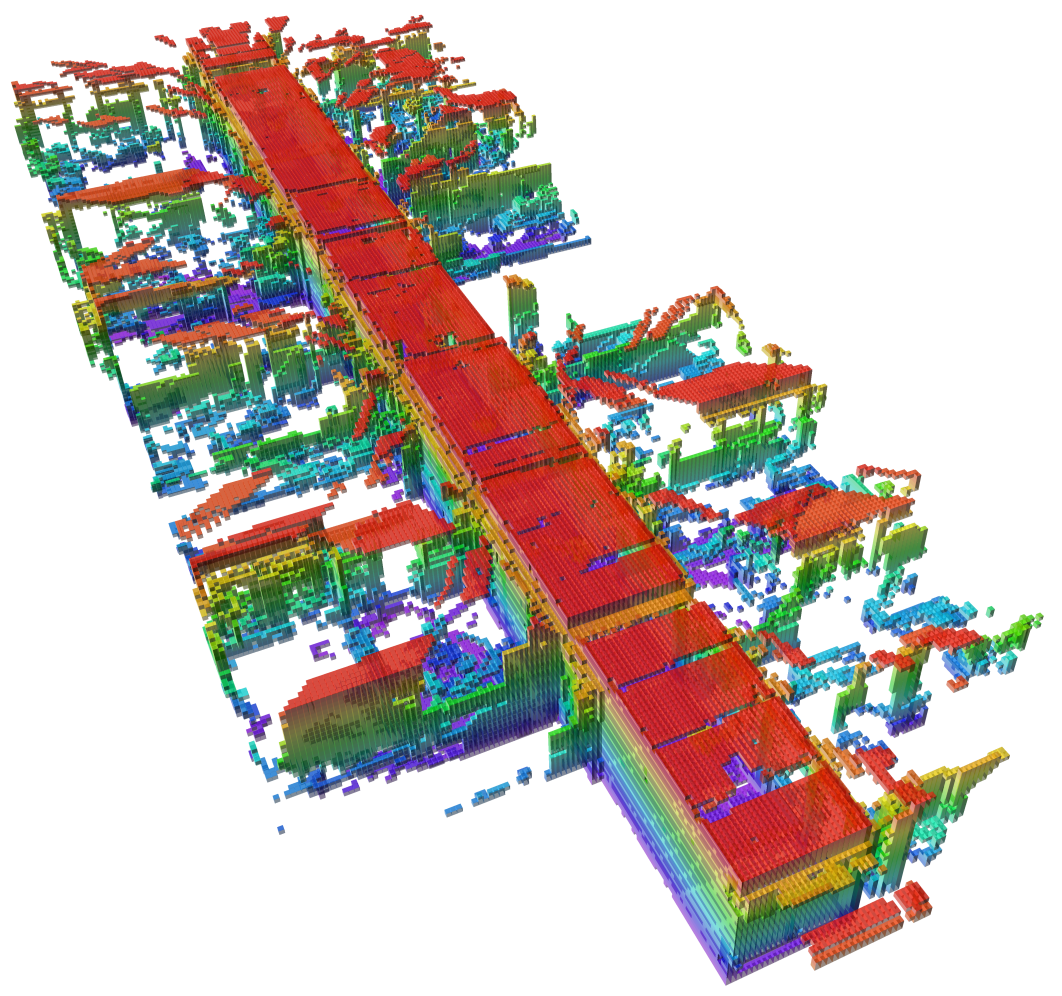
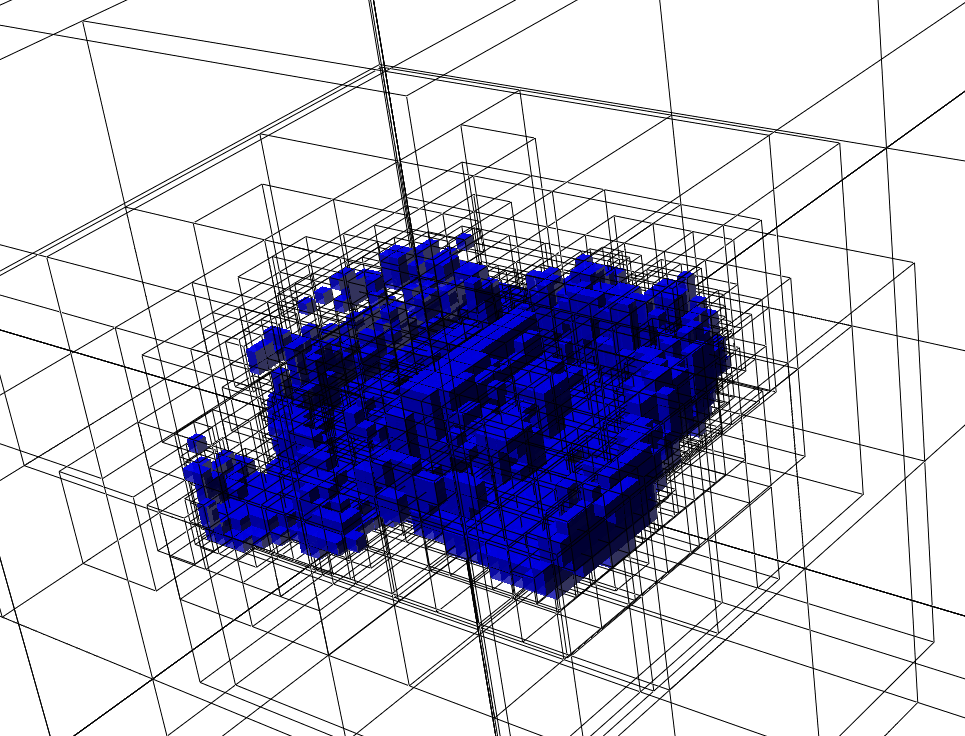
The grid itself can be two-dimensional (2D) or three-dimensional (3D), depending on the application and the complexity of the environment. 2D occupancy grids are commonly used for representing planar environments, such as indoor spaces or flat terrains, while 3D grids are used for more complex environments with varying heights, such as outdoor spaces or indoor spaces with multiple levels.
Construction and Updating: Building the Map
Occupancy grid maps are typically constructed using sensor data, such as laser rangefinders, sonar, cameras, or tactile sensors. The process of constructing an occupancy grid map involves the following steps:
-
Sensor Data Acquisition: The robot or system acquires sensor data from its surroundings. This data can be in the form of point clouds, range measurements, or image data.
-
Data Processing: The acquired sensor data is processed to extract relevant information about the environment, such as the location and size of obstacles.
-
Grid Initialization: An empty grid is initialized with all cells marked as unknown (i.e., having a probability value of 0.5).
-
Cell Occupancy Update: For each sensor measurement, the corresponding cells in the grid are updated based on the probability of occupancy. For example, a laser rangefinder measurement indicating a wall at a specific distance would update the corresponding cells in the grid to have a higher probability of being occupied.
-
Map Refinement: The occupancy grid map is continuously updated as the robot or system moves through the environment, accumulating more sensor data and refining the probability values of each cell.
Applications: From Robots to Autonomous Vehicles
Occupancy grid maps have a wide range of applications in various fields, including:
Robotics:
- Navigation: Occupancy grid maps are fundamental for path planning and navigation in robots. They enable robots to identify obstacles, plan efficient routes, and avoid collisions.
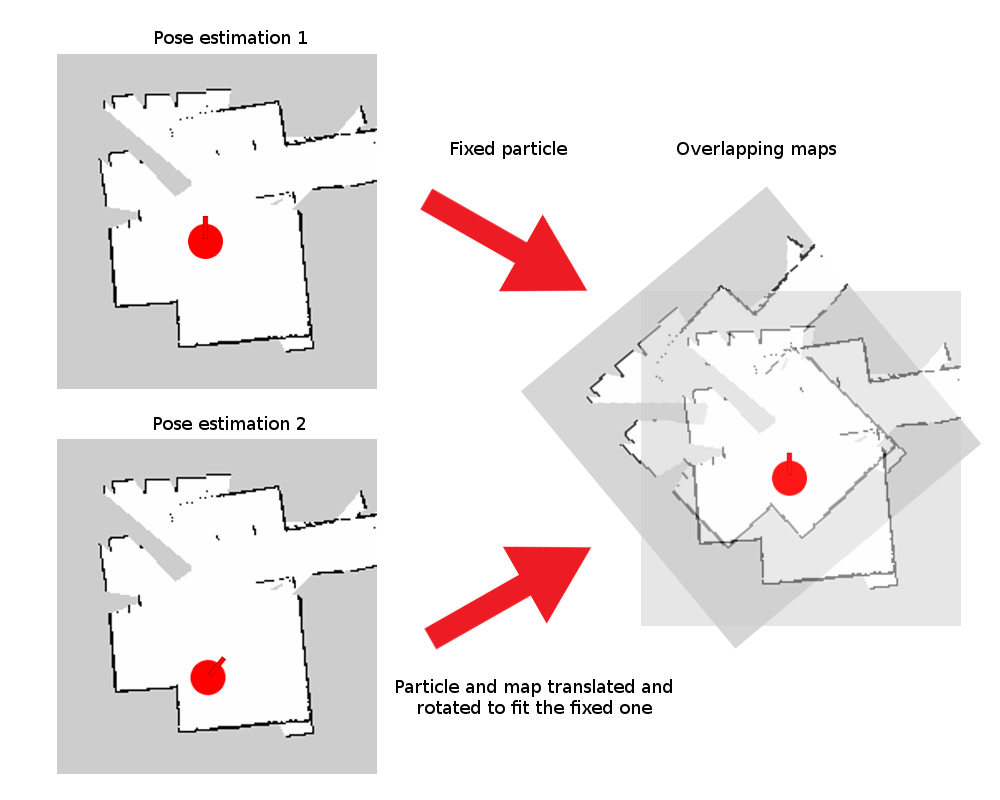
- Localization: By comparing sensor measurements with the known occupancy grid map, robots can determine their position and orientation within the environment.
- Mapping: Robots can use occupancy grid maps to create detailed maps of their surroundings, which can be used for various tasks, such as exploration, search and rescue, and environmental monitoring.
Autonomous Vehicles:
- Autonomous Driving: Self-driving cars use occupancy grid maps to understand their surroundings, detect obstacles, and plan safe driving routes.
- Parking Assistance: Advanced parking systems use occupancy grid maps to identify available parking spaces and guide the vehicle into them.
Other Applications:
- Computer Vision: Occupancy grid maps are used in computer vision tasks such as scene understanding, object detection, and tracking.
- Virtual Reality: Occupancy grid maps can be used to create realistic virtual environments for training, simulation, and entertainment purposes.
- Medical Imaging: Occupancy grid maps are used in medical imaging to represent anatomical structures, allowing for accurate diagnosis and treatment planning.
Advantages: Benefits of Occupancy Grid Maps
Occupancy grid maps offer several advantages over other spatial representation methods, making them a popular choice for various applications:
- Simplicity: The grid-based structure makes occupancy grid maps easy to understand and implement.
- Flexibility: They can be easily adapted to different environments and sensor types.
- Computational Efficiency: Occupancy grid maps are computationally efficient, allowing for real-time processing of sensor data and rapid path planning.
- Data Integration: They can be easily integrated with other sensor data, such as GPS, odometry, and inertial measurements.
- Robustness: Occupancy grid maps are relatively robust to noise and sensor errors, providing reliable representations of the environment.
Limitations: Considerations for Occupancy Grid Maps
Despite their advantages, occupancy grid maps have some limitations that should be considered:
- Resolution: The resolution of the grid affects the accuracy of the map. A higher resolution grid provides a more detailed representation of the environment but requires more computational resources.
- Memory Requirements: Storing and processing large occupancy grid maps can be memory-intensive, especially for high-resolution grids or 3D maps.
- Static Environments: Occupancy grid maps are typically designed for static environments. Dynamic objects, such as moving people or vehicles, can cause inaccuracies in the map.
- Sensor Limitations: The accuracy of the occupancy grid map is dependent on the quality and range of the sensors used.
FAQs: Addressing Common Queries
Q: What are some common methods for representing occupancy in a cell?
A: Occupancy probabilities are typically represented using:
- Binary representation: Cells are assigned either 0 (empty) or 1 (occupied). This is a simple representation but lacks the ability to handle uncertainty.
- Probabilistic representation: Cells are assigned a probability value between 0 and 1, representing the likelihood of being occupied. This allows for handling uncertainty and representing partially occupied cells.
- Log-odds representation: The logarithm of the odds ratio (occupied/empty) is used to represent the occupancy probability. This representation is computationally efficient and allows for easier integration with Bayesian filtering methods.
Q: How can I handle dynamic objects in an occupancy grid map?
A: Dynamic objects can be addressed using various approaches:
- Temporal filtering: By applying a temporal filter to the sensor data, dynamic objects can be identified and removed from the map.
- Object tracking: Tracking algorithms can be used to identify and track dynamic objects, allowing for their inclusion or exclusion from the map as needed.
- Dynamic occupancy grid maps: These maps are designed to handle changing environments, updating the occupancy probabilities of cells based on the movement of dynamic objects.
Q: What are some popular algorithms for path planning using occupancy grid maps?
A: Common path planning algorithms used with occupancy grid maps include:
- *A search:** A heuristic search algorithm that finds the optimal path from a starting point to a goal point, considering the occupancy grid map as a cost function.
- Dijkstra’s algorithm: A shortest path algorithm that finds the shortest path between two points, considering the occupancy grid map as a weighted graph.
- Probabilistic roadmap (PRM): A sampling-based algorithm that constructs a roadmap of the environment by randomly sampling points and connecting them with collision-free paths.
Q: What are some tools and libraries for working with occupancy grid maps?
A: Several tools and libraries are available for working with occupancy grid maps, including:
- ROS (Robot Operating System): Provides a framework for building and running robotic applications, including occupancy grid map creation, navigation, and visualization.
- OpenCV (Open Source Computer Vision Library): Provides a wide range of computer vision algorithms, including image processing and object detection, which can be used for occupancy grid map construction.
- PCL (Point Cloud Library): Provides tools for working with point clouds, which are often used as input for occupancy grid map creation.
- NumPy and SciPy: Python libraries for numerical computing and scientific computing, which can be used for manipulating and processing occupancy grid maps.
Tips for Effective Occupancy Grid Map Usage
- Choose the appropriate grid resolution: The resolution should be fine enough to capture relevant details of the environment but not so fine that it leads to excessive memory consumption.
- Consider the sensor type and its limitations: Different sensors have different characteristics, such as range, accuracy, and field of view, which should be considered when constructing the occupancy grid map.
- Implement robust data filtering and smoothing techniques: This can help reduce noise and improve the accuracy of the map.
- Use efficient data structures and algorithms: This is essential for real-time processing and path planning.
- Regularly update the map: As the robot or system moves through the environment, the map should be updated to account for changes in the environment.
Conclusion: A Powerful Tool for Spatial Reasoning
Occupancy grid maps provide a powerful and versatile tool for representing and reasoning about the environment. Their simplicity, flexibility, and computational efficiency make them suitable for a wide range of applications in robotics, autonomous navigation, and computer vision. By understanding the principles of occupancy grid map construction, usage, and limitations, developers and researchers can leverage their capabilities to create robust and intelligent systems that interact with the world in meaningful ways. As technology advances, occupancy grid maps will continue to play a vital role in enabling robots and autonomous systems to navigate and interact with complex environments, paving the way for a future where intelligent machines seamlessly integrate with our world.



Closure
Thus, we hope this article has provided valuable insights into Navigating the World with Occupancy Grid Maps: A Comprehensive Guide. We thank you for taking the time to read this article. See you in our next article!